
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 31 |
- 3-sigma rule
- Motion compensate
- lidar
- Coding Test
- PYTHON
- Azimuth
- coordinate system
- HDmap
- nvidia
- PointCloud
- Interference Pattern
- VLS-128
- Veloview
- Reflectivity
- Multi threaded
- Frame rate
- Data Race
- ApolloAuto
- object detection
- PointCloud Frame
- Phase Offset
- Smart Pointer
- Quaternion 연산
- Single threaded
- 센서셋
- Phase Lock
- Data Packet
- Alpha Prime(VLS-128)
- timestamp
- Alpha Prime
- Today
- Total
엔지니어 동행하기
Object Detection의 Coordinate System(WGS84, ENU, UTM, RFU) 정리 본문
Object Detection의 Coordinate System(WGS84, ENU, UTM, RFU) 정리
엔지니어 설리번 2022. 7. 3. 10:19자율주행 자동차가 Object Detection을 할 때, 좌표계 간의 변환을 통해 Object 데이터를 표현하게 됩니다. 즉, 카메라나 LiDAR 좌표계에서 얻어진 Object의 Position을 지구 위의 한 점으로 표현을 해야 합니다. 따라서 좌표계에 대한 정의와 이로부터 데이터를 어떻게 해석할지를 정리하도록 하겠습니다. 해당 포스팅은 Apollo coordinate system을 바탕으로 작성하였습니다.
WGS 84 : Global Geographic Frame
(World Geodetic System , WGS) 세계 지구 좌표 시스템으로 1984년에 재정된 범 지구적 측위 시스템입니다. WGS84는 지도학(mapping), 측지학(positioning), 항법(navigation)과 같은 GIS에서 많이 사용됩니다.
좌표계를 이해하기 위해서는 원점과, 특정 point를 어떻게 표현하는지를 알아야 합니다. 이에 대한 자세한 설명은 아래 블로그를 참고하였습니다.
https://grizzy-bear-blog.tistory.com/22
QGIS 공부하기 - WGS84, UTM, DMS, DD 좌표계 이해하기
1. WGS84 좌표계 / World Gedetic System coordinate 1.1 좌표계 이해 지구는 약간 부풀려진 타원체 모양을 하고 있다. 지구의 모든 지역에 각각 이름을 붙이려고 한다. WGS84 좌표계는 지구의 한 점을 콕 집어
grizzy-bear-blog.tistory.com
간단히 정리하면 WGS 84의 원점(0.0º, 0.0º)은 적도와 본초자오선이 교차하는 점입니다.
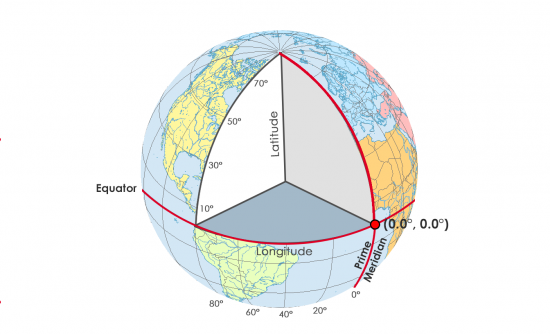
지구 표면의 특정 point를 표현하는 방법은 Latitude, Longitude를 이용하는 것입니다. 아래와 같이 피츠버그의 위치를 원점에서 북쪽으로 40.4 degree, 서쪽으로 80.0 degree 떨어져 있다고 표현할 수 있습니다.

이러한 방식으로 WGS84는 지구 표면의 어떤 point든(North Pole 제외) 유일한 값으로 identify 할 수 있습니다. Apollo에서 유일한 값을 x, y 좌표로 나타내고 이는 각각 Longiude, Latitude에 대응됩니다. 또한 Elevation 값은 ellipsoidal height로 정의합니다. (Geoid, Ellipsoid에 대한 정의는 찾아보시기 바랍니다.) 이를 통해 HDMap element들의 geometric position을 나타냅니다.

ENU : Local Frame
Esat-North-Up은 Local Frame으로 방향을 나타낼 때 사용합니다. 따라서 원점보다 축의 방향을 어떻게 정의하는지가 중요합니다. 아래 그림을 보면 x축은 East 방향을, y축은 North 방향을, z 축은 중력과 나란한 방향으로 Up 방향을 의미합니다.

Apollo에서는 ENU를 이용해서 Object의 Yaw angle을 Local Frame에서 나타냅니다. 즉 동쪽을 기준으로 Object의 Heading을 radian(-π ~ π)으로 표현할 수 있습니다. Local Frame에서 Object의 Position을 나타내기 위해서는 또 다른 Frame이 필요합니다. 이를 위해 UTM을 사용합니다.
UTM : Local Frame
UTM은 경도 6도 간격으로 전 세계를 60개 Zone으로 나눕니다. 각각의 Zone에 원점이 정의되고(따라서 Local Frame이라 함), 우리나라는 52번째 Zone에 포함됩니다. 이 지역의 중심 경도선인 경도 129도와 적도의 교차점을 원점으로 정의합니다. 이에 대한 자세한 설명은 아래 블로그를 참고하면 됩니다.
https://m.blog.naver.com/pig9456/180387489
UTM과 우리나라 TM
UTM 좌표계 (Universal Transverse Mercator) 기본적으로 TM과 같은 방법으로 투영계산을 거치지만...
blog.naver.com

Apollo에서는 UTM을 이용해서 Object의 Position을 나타냅니다. 즉 단위는 meters이고, 위쪽 그림에 나타낸 축을 기준으로 몇 meter 떨어져 있는지로 인지 물체의 위치를 표현합니다. 이러한 표현은 Localization, Planning 모듈 등에서 사용합니다.
(참고) UTM to WGS84 Converter
두 좌표계 간의 변환을 통해, 각 좌표계를 더 깊이 있게 이해할 수 있습니다. 다음 사이트는 UTM 좌표를 WGS84 좌표로 변환해서 Google Map에서 볼 수 있도록 도와줍니다.
https://www.engineeringtoolbox.com/utm-latitude-longitude-d_1370.html
UTM to Latitude and Longitude Converter
Convert from UTM - Universal Transverse Mercator - coordinates to latitude and longitude coordinates. *) Based on the WGS84 Datum - the calculator is valid for the northern hemisphere. In the UTM coordinate system a grid is used to specify locations on the
www.engineeringtoolbox.com

UTM좌표 (322180, 4158006)과 52번째 Zone을 입력하고 Convert를 하면 Latitude, Logitude 값을 출력합니다. 그리고 show postition in Google Maps! 를 클릭하면 아래와 같이 위치를 확인할 수 있습니다.

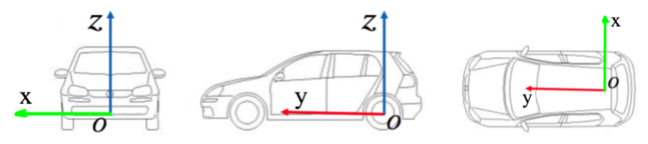
RFU : Vehicle Frame
Right-Front-Up, Apollo에서는 차량 좌표계를 아래와 같이 정의합니다. x축은 주행하는 방향 기준 오른쪽 방향, y축은 주행하는 방향, z축은 ground에서 roof 쪽 방향을 향합니다. 그림에서 Vehicle Frame의 원점이 차량 뒷바퀴 중심에 위치함을 알 수 있습니다.
센서별 Body Frame 또한 중요하며 이에 대한 포스팅은 다음 링크를 참고하면 됩니다.
Object Detection에서 Depth Cam/LiDAR/Camera 별 Coordinate System 정리
이번 포스팅에서는 3D Object Detection 문제를 해결하는 생태계에서 사용하는 Coordinate System에 대해 정리하겠습니다. 데이터를 해석하기 위해 알아야 하는 굉장히 중요하고 기본이 되는 개념입니다.
engineer-sullivan.tistory.com
https://github.com/ApolloAuto/apollo/blob/master/docs/specs/coordination.pdf
GitHub - ApolloAuto/apollo: An open autonomous driving platform
An open autonomous driving platform. Contribute to ApolloAuto/apollo development by creating an account on GitHub.
github.com
http://geokov.com/education/utm.aspx
UTM: Projection - Zone - Grid - Coordinates
UTM - Universal Transverse Mercator UTM Projection As the name suggests, the Universal Transverse Mercator projection is based on the cylindrical Transverse Mercator projection. The cylinder in the Transverse Mercator projection is tangent along a meridian
geokov.com
(Apollo는 UTM의 국제 기준을 준수하고 있음)
'Perception Engineering (LiDAR) > Object Detection' 카테고리의 다른 글
| CUDA Programming 예제, NMS 알고리즘 처리하기(GPGPU) (0) | 2022.07.10 |
|---|---|
| Coordinate System간의 Transform(Euler, DCM, Quaternions) (0) | 2022.07.03 |
| Object Detection에서 Depth Cam/LiDAR/Camera 별 Coordinate System 정리 (0) | 2022.06.19 |
| Object Detection with CUDA-PointPillars (0) | 2022.06.05 |



