
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 31 |
- object detection
- Quaternion 연산
- PYTHON
- timestamp
- Motion compensate
- Data Packet
- Reflectivity
- VLS-128
- lidar
- Alpha Prime
- PointCloud Frame
- Azimuth
- Phase Lock
- Data Race
- Veloview
- Smart Pointer
- nvidia
- PointCloud
- 센서셋
- 3-sigma rule
- coordinate system
- Multi threaded
- Single threaded
- Alpha Prime(VLS-128)
- Frame rate
- Interference Pattern
- Phase Offset
- ApolloAuto
- Coding Test
- HDmap
- Today
- Total
엔지니어 동행하기
Velodyne LiDAR (Alpha Prime, VLS-128) Data Packet, 센서 데이터 본문
Velodyne LiDAR (Alpha Prime, VLS-128) Data Packet, 센서 데이터
엔지니어 설리번 2022. 6. 7. 21:26LiDAR를 통해 얻을 수 있는 데이터의 형태가 어떤 지 설명드리겠습니다. 즉, LiDAR에 전원을 인가하고 Data Port로 Data Packet 이 얻어집니다.
2022.06.06 - [Perception Engineering/LiDAR] - Velodyne LiDAR (Alpha Prime, VLS-128) FOV, frame rate
Velodyne LiDAR (Alpha Prime, VLS-128) FOV, frame rate
velodyne 사에서는 LiDAR와 함께 Datasheet, Manual, Web Interface, Veloview를 제공하고 있습니다. 관련하여 제가 연구를 하며 정리했던 내용을 공유합니다. 먼저 Datasheet의 용어들과 실질적인 의미들에 대해..
engineer-sullivan.tistory.com
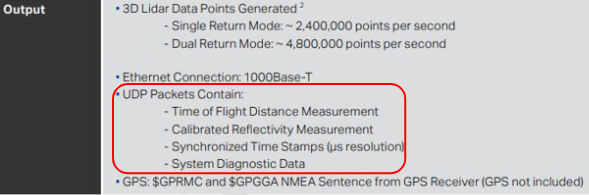
LiDAR Output
아래 표를 보면 센서를 통해 얻을 수 있는 데이터로 UDP Packet과 GPS 정보가 있다는 것을 알 수 있습니다. 이번 포스팅에서는 UDP Packet에 대해 자세히 설명드리겠습니다. LiDAR 센서는 Sensing 한 데이터를 Packet 형태로 묶어서 출력을 해줍니다.
Data Packet Structure

위의 표에서 중요하게 봐야 할 부분은 3가지입니다.
- Data Packet은 3번의 Firing Sequence 데이터를 포함하고 또한 이는 12개의 Data Block으로 나눠집니다. Firing Sequence (= Firing Group)는 0~127 channel 레이저가 발사된 것을 의미합니다.
- Firing Sequence에 포함된 데이터는 동일한 Azimuth를 갖습니다.

3. Data Packet의 Timestamp는 4byte로 동일한 값을 갖습니다.
Data Point
Data Packet Structure 표에서 0부터 127까지 숫자가 반복되는데, 각 숫자는 레이저 채널을 통해 얻은 데이터들을 의미합니다. 데이터에는 Distance, Intensitiy(Reflectivity) 값이 있습니다. Elevation에 해당하는 값은 채널(레이저 번호)을 통해 구할 수 있습니다.

정리하면 구 좌표계의 점 (R, α, ω)와 intensity 값을 얻는 것입니다.
Single Reuturn Mode : 2,400,000 points/sec 계산
- There are 3 firing cycles in a data packet. 3 x 53.3 μs = 0.1599 ms is the accumulation delay per packet. 1 packet/0.1599 ms = 6253.9 packets/second
- 128 laser firings/firing group * 3 firing groups/packet = 384 laser firings/packet
- 384 laser firings/packet * 6253.9 packets/second = 2401497.6 laser measurements per second
(10Hz일 때, 한 frame에 240,000 points 얻어짐)
'Perception Engineering (LiDAR) > LiDAR' 카테고리의 다른 글
| Robosense LiDAR의 Data Packet 분석: Wireshark 활용 (0) | 2022.07.24 |
|---|---|
| Veloview 활용, 선택한 Point의 Azimuth & laserID 확인하기 (0) | 2022.06.18 |
| LiDAR Timestamp(UTC time)의 의미, Frame rate 계산&분석 방법 (0) | 2022.06.18 |
| Alpha Prime(VLS-128) 데이터, VeloView로 확인하기 (0) | 2022.06.12 |
| LiDAR(Alpha Prime, VLS-128) FOV, frame rate의 물리적 해석 (0) | 2022.06.06 |



